连杆自适应手指
15机械系
作品介绍
连杆自适应手指
作者:张芸嘉 机械工程系
指导老师:张文增 机械工程系
关键词:机器人手指 欠驱动 自适应
摘要
本项目运用连杆机构实现了一种新型的具有平夹和自适应两种抓取模式的机器人手指。该机器人手指有3个指段,末端指段能够水平夹持物体,中间两个指段能够自适应抓取物体。当中部指段碰到物体后,手指受力会实现柔顺包络抓取。
该手指相比传统平夹自适应手指的包络抓取更快速。该手指仅通过1个电机驱动,通过蜗轮蜗杆传动,运用1个主动连杆、多个从动连杆、弹簧和限位块等实现良好的多模式抓取。该新型机器人手指具有抓取稳定性高,适应面广,结构相对简单,制造成本比较低,控制容易等突出优点。该手指具有广泛的应用前景,比如物流机器人、仿生机器人等领域。
平行夹持原理
电机带动主动连杆转动,由于弹簧和限位块的作用,整个机构保持平行四边形,使末端指段能够平动,从而实现平行夹持功能。

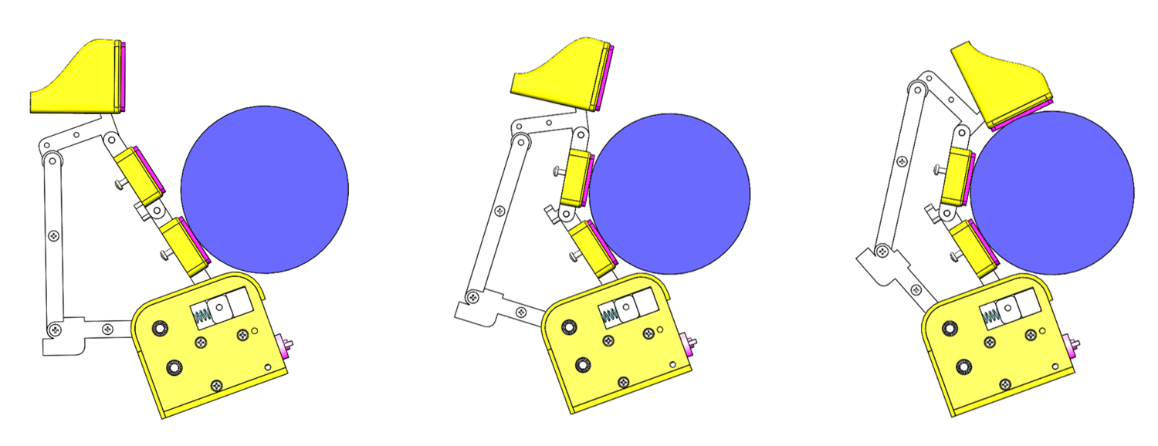
自适应包络抓取原理
电机带动主动连杆转动,当中间指段先碰到物体,中间关节就会自动弯曲,在主动连杆推动下,实现2至3个指段包络抓取。

抓取实验

作品PPT
评论 文明上网理性发言,请遵守评论服务协议

登录 登录后可以发言~
全部评论
主办方

承办方


