用户名:
密码
注册
登录
首页
结构设计
信息互联
过往经典
理论探究
人文求索
社会声誉
首页
>
结构设计
>
刚软混合五指灵巧手
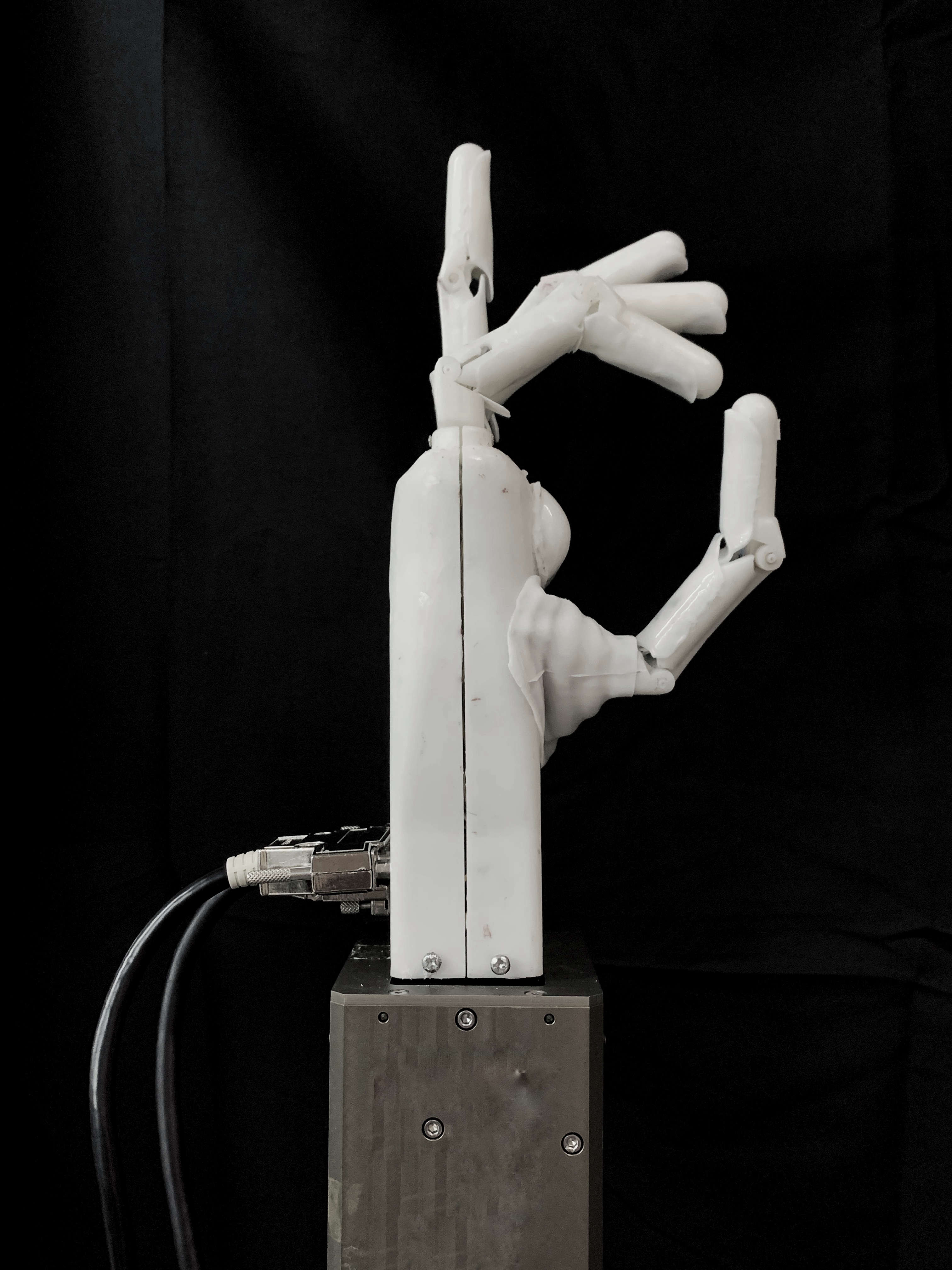
刚软混合五指灵巧手
机械工程及自动化学院
作品介绍
针对灵巧手的抓取动作,我们设计了模块化的手指结构以及可以内收外展的大拇指掌骨结构与刚软混合的手掌结构,通过独特的掌骨结构实现灵巧手对于不同形状物体采取不同的抓取策略,通过采用将强弱电分离的控制方式提高了灵巧手控制的可靠性,而刚软混合的手掌结构可以帮助灵巧手在抓取不同形状的物体时,获得更大的接触面积,从而具有更好的抓持稳定性与可靠性。
作品视频1
评论
文明上网理性发言,请遵守评论服务协议
登录
登录后可以发言~
全部评论
主办方
承办方