
小型农田智能播种小车
作者:王鹏兵 机械工程系
指导老师:李永健 机械工程系
关键词:结构设计、信号处理、理论分析
摘要
本作品提出了一种适用于小型农田的智能履带式播种小车,将机械臂和传统的手工器械相结合,扬长避短,将机械自动化控制应用于农田玉米播种,旨在提高广大农村地区的农业机械化水平,促进农业大力发展。
项目背景
当前市场上的玉米播种机品牌种类繁多,大概可以分为两大类。第一类是小型的手按式播种器,结构简单,使用时主要靠手发力,体型小,但会耗费大量人力;第二类是大型玉米播种机,结构相对复杂,体型较大,在地势平坦的大型农田里能够大幅提高播种效率,耗费人力较少,但无法在小型农田里工作。目前,在我国大部分农村地区,大型播种器械很难进入,农业生产者只能使用手工播种器械进行播种,耗费了大量人力。
为了解决这个问题,我们设计了一种小型农田智能播种小车,通过机械化控制实现种子播种,提高农业生产效率和自动化水平。

图1 手按式播种器

图2 大型玉米播种机
项目实现
小车的工作环境为铺有地膜的玉米地。
具体功能实现:
(1)插播动作。要求种子在插播过程中基本保持直上直下,因此需要保持:

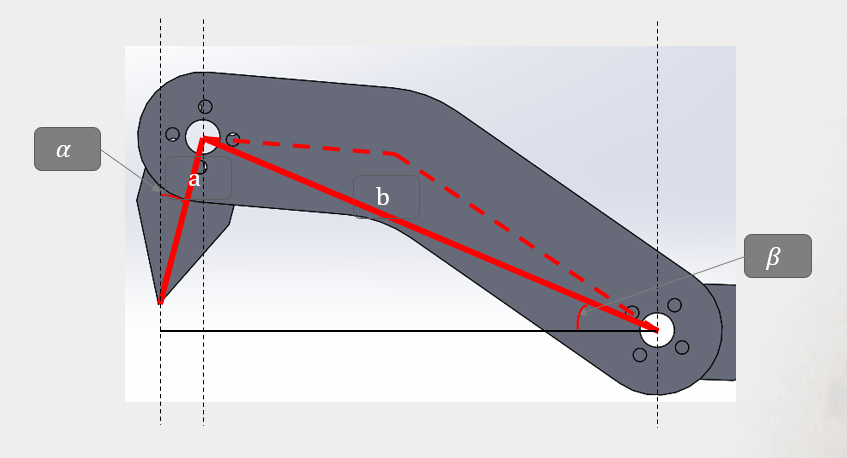
图3 插播动作实现
(2)路线偏移角度判断。利用霍夫直线变换将图像中的直线存到lines中,然后求出所有检测到直线度角的平均值,得到小车路线偏移角度,使小车在行走时能够实时监测偏移角度实时调整,按规定路线行走;
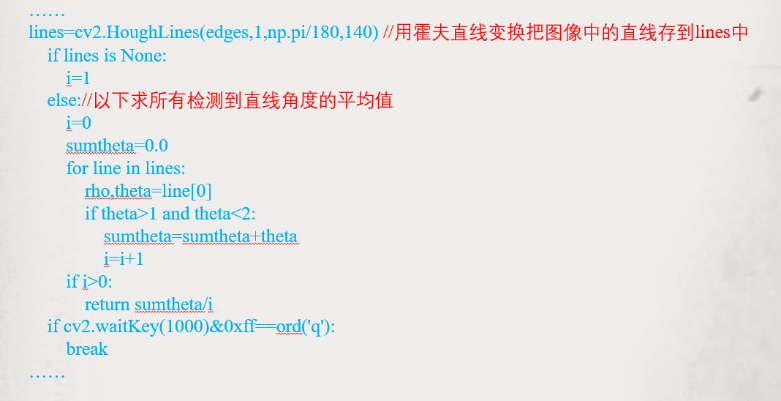
图4 路线偏移角度判断
(3)种子传输及播种。利用鼓风机和管道将车载种子吹送至插播头,通过插播头内部结构控制种子下落,实现每次有一到两枚种子落下,避免空播。
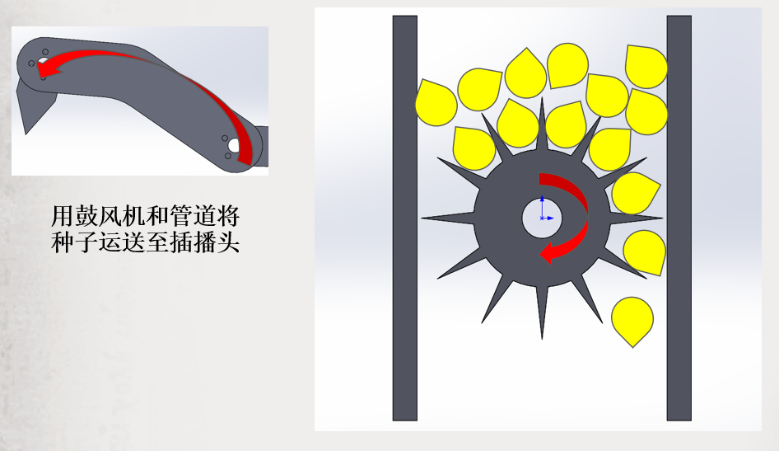
图5 种子传输及播种
总结展望
本作品基于大型和小型播种器械的优点,将机械臂和传统的手工器械相结合,扬长避短;驱动采用履带,可以适应小型农田复杂的路面的情况;通过控制机械臂及小车的运动状态,实现种子等距播种,且种子间距可自由调整,能够在提高播种效率的同时保证播种质量;通过摄像头识别地面情况来规划路径,调整小车的行进路线,实现小车的无人控制自动化行走和自动化播种,解决了人力耗费过大的问题。将来我们期望小车能够做得更好,功能更可靠,能够解放人力,提高播种效率,为农业机械的发展提供一定的借鉴,为促进农业发展做出贡献。




