
基于队形保持的无人机编队避障方法与系统研究
16精仪系
作品介绍
作者:刘宇航 精密仪器系
指导老师:孟子阳 精密仪器系
关键词:角刚度理论,无人机编队
摘要
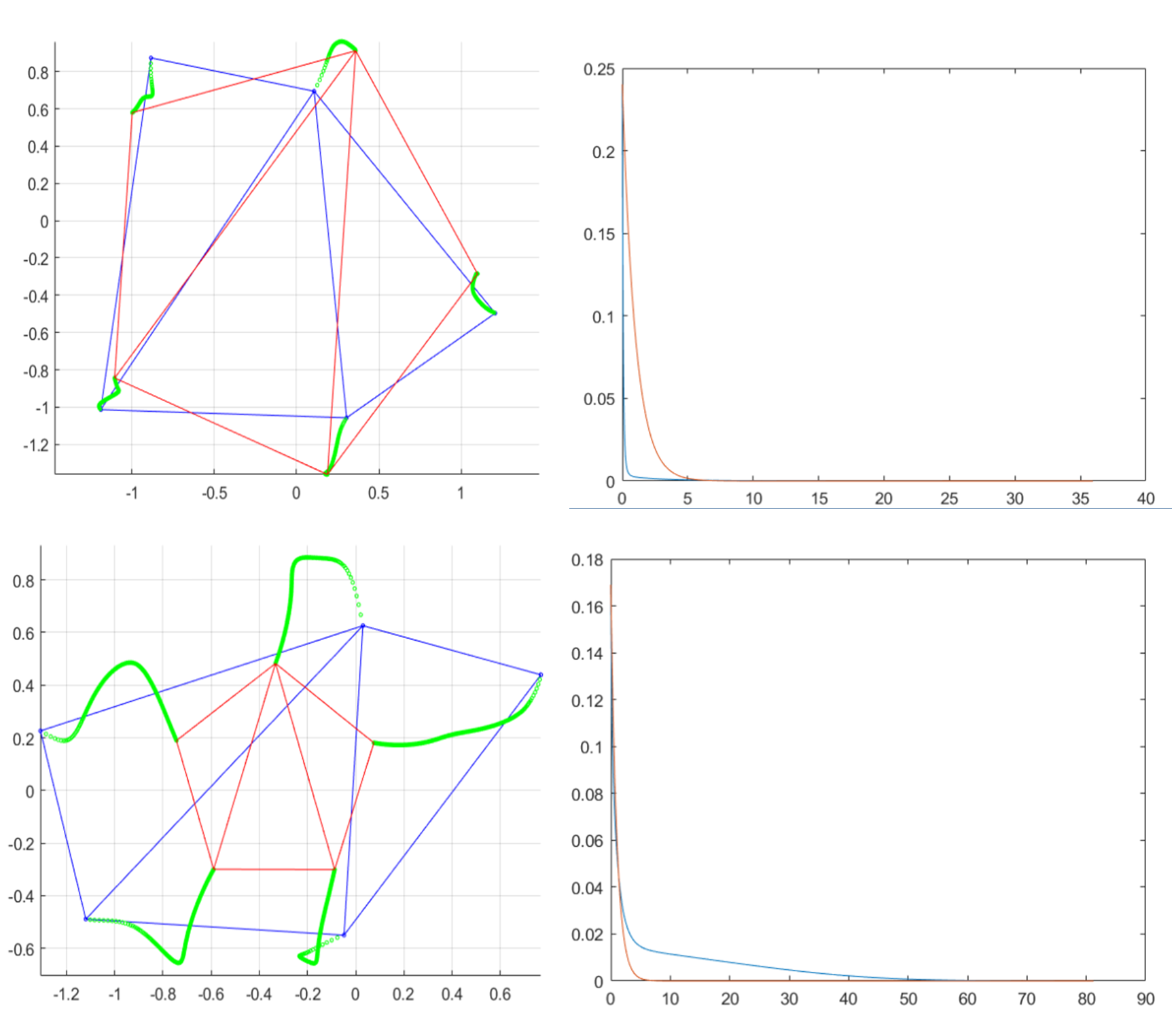
无人机编队控制在执行火场等室内危险环境的搜救任务中,存在着一定的优势,具有很好的发展与应用前景。但之前的无人机编队控制方法基本上全部都是基于距离刚性理论进行编队控制,在避障过程中采用的也是队形变换的方法,但在一些特定情况下需要无人机编队的队形保持,如果利用距离刚性理论会过于复杂。因此,我们将会利用无人机编队中飞机间的夹角来控制整个编队,使其在穿越障碍物时调整整体编队队形的大小,使其能够在保持队形不变的情况下安全通过障碍物,完成指定搜救任务等。
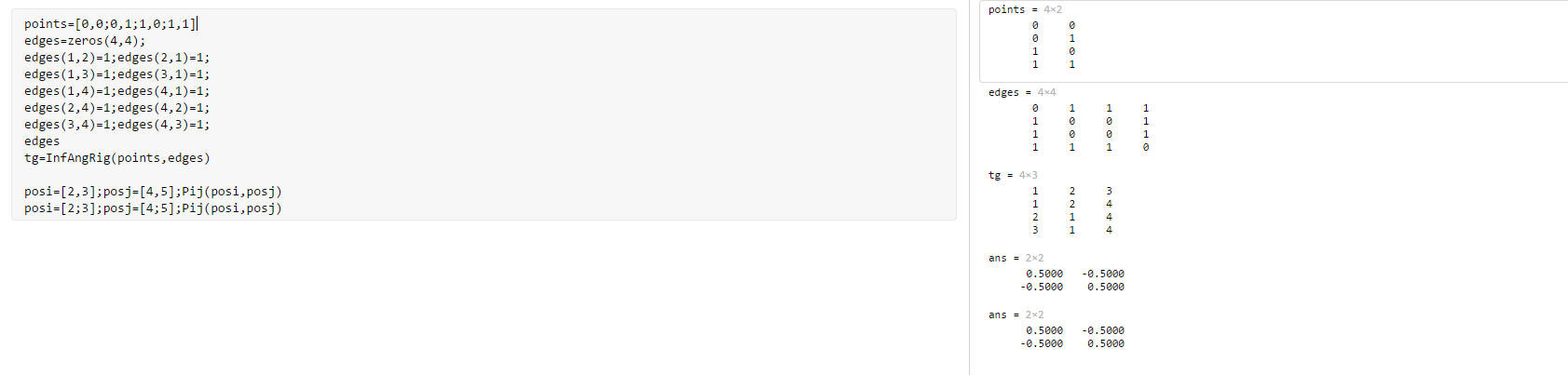
角度刚性理论
“角度刚性理论”与之前的控制方法相比,主要具有以下三处优势:1.利用角度控制队形具有更高的自由度,在做平移、旋转、队形放缩等运动时,仍能保证队形;2.无人机之间不需要通讯系统;3.每一架无人机只需要对相邻无人机在局部坐标系中的位置进行检测,不需要全局坐标系全部已知。
图片格式:

作品PPT
评论 文明上网理性发言,请遵守评论服务协议

登录 登录后可以发言~
全部评论
主办方

承办方


