作者:支云峰 车辆与运载学院
指导老师:侯之超 车辆与运载学院
关键词:行走机构;车轮;履带;变形;动力切换
摘要
车轮和履带两种行走机构具有不同的优点,如何将其结合成为一项能够应用在特种军事领域的关键技术。本项目自主设计了一种新型可变形履带-车轮混合行走装置,能够在轮式机构与履带机构间变型切换,实现圆形转动以及履带式传动。本项目打破了国外技术垄断,实现了国内本领域的突破。
背景介绍
本作品自主设计了一套新型可变形履带-车轮混合行走装置(如图1),以用于需要在恶劣地形行驶的轻型装甲车上。
装甲车主要分为轮式和履带式两种行走模式,其中轮式高速性能好但是路面通过性差,在极端路况易发生陷车,而履带式虽然通过性强但是高速性能差。现在的常用手段是为车轮加装防滑装置,但会花费大量的安装时间。
为了解决这一问题,需要将两种行走装置相结合。美国、印度等国家已有相关研究并甚至完成了实物的制作;而目前国内的军工研究所、高校虽然也有相关研究,但并无能够与国外研究对标的成熟项目。因此该技术正处于国外垄断状态,需要技术突破,本项目正建立在这一背景上。
项目创新
为了实现混合行走装置的在圆形车轮形态下转动、三角履带形态下外履带运动的功能,针对动力传输、控制外轮廓变化及、履带传动进行了创新与自主设计:
- 通过结构模块化及双离合装置实现动力传输路径的切换。装置被分为为传动、变形、支撑三模块,其中变型模块能通过双离合系统与其他模块分别锁死,实现两种动力传输方式(如图2);
- 使用电推杆控制装置变形。在机械、液压、电控方案间选择电推杆进行控制变型(如图3),可以针对受力不均匀的情况对电推杆推力进行单独调节,并利用其自身结构实现自锁功能。
- 设计基于连杆组的传动齿轮链进行履带传动。为履带提供动力的驱动轮与中心轴距将发生变化;通过起、末距可调的连杆齿轮组实现中心动力输入、边缘动力输出(如图4),驱动履带在装置任意形状下运动。
成果介绍
确定项目目标后,本作品自主设计了新型可变形履带-车轮混合行走装置,能够实现轮式转动、形状变化、履带式传动及传动方式切换四大功能。
本作品已经完成实物的实际组装和基本功能的实际验证(如图5);同时在计算平台完成运动学仿真、强度仿真(如图6、7)等必要校核工作。在功能方面额外实现了变形系统与行走系统的动力独立,可以在任意形状下实现任意的传动方式,增加装置的通过性。
本作品兼具了车轮、履带两种行走机构的优点,并且在重量控制、安装更换上也表现优良,有很大的应用价值和继续开发价值,可以应用在军用车辆、越野载具等领域。
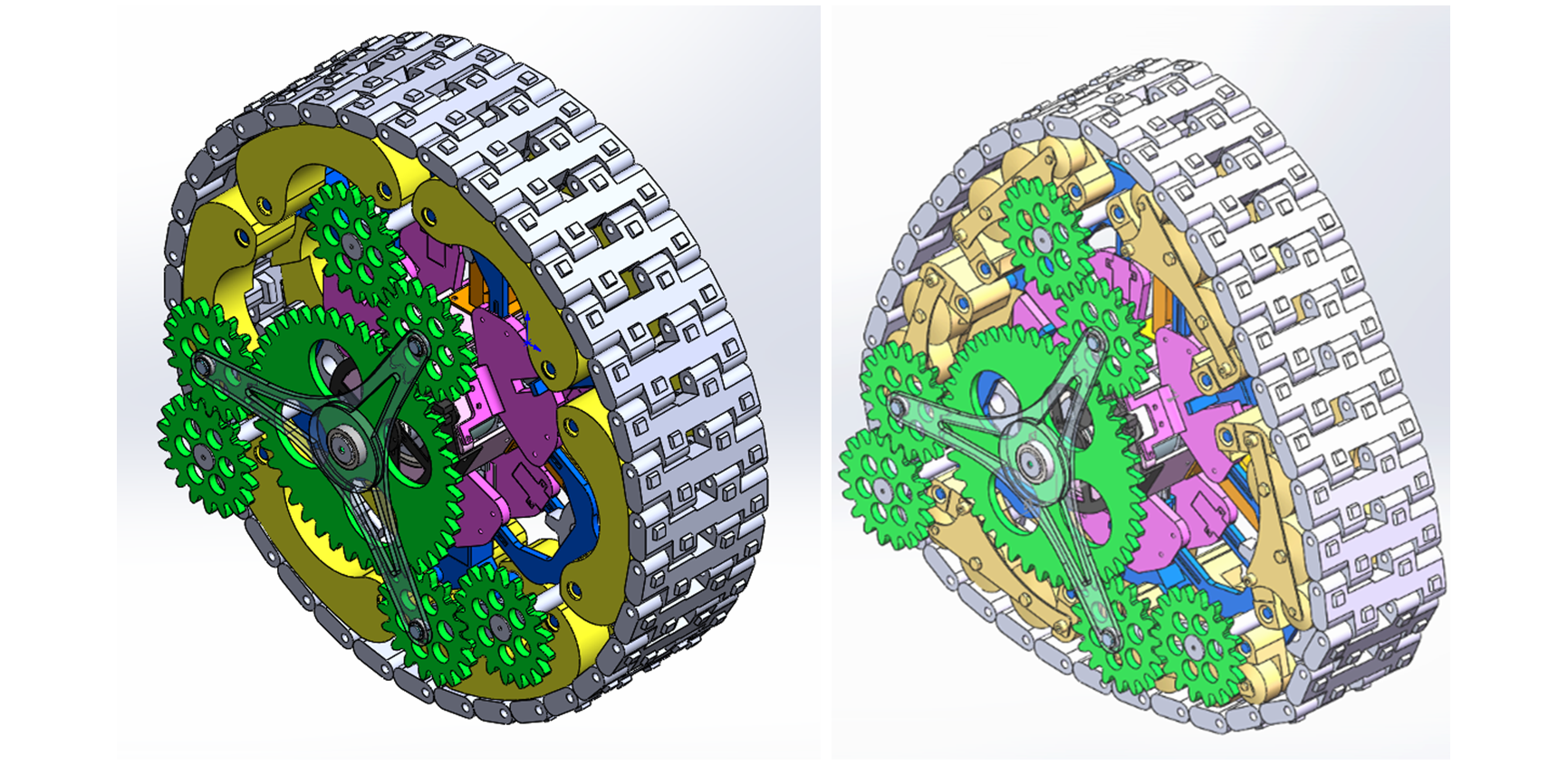
图1 新型可变形履带-车轮混合行走装置模型(a)圆形状态(b)三角形态
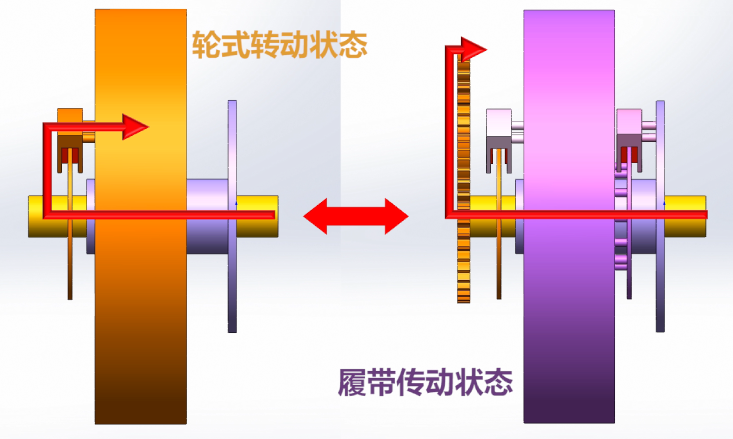
图2 轮式转动与履带传动状态动力传输路径示意

图3 变型方案迭代
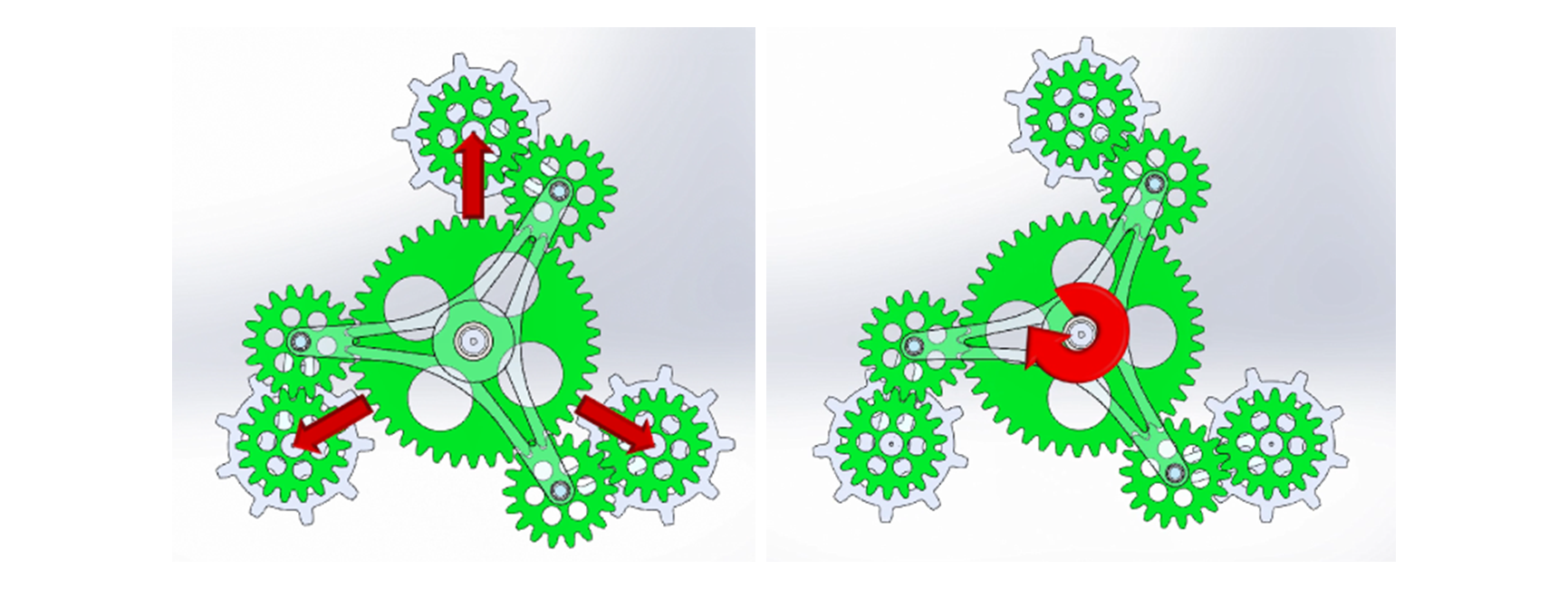
图4 用于履带动力传递的连杆齿轮组
(a)变型过程(b)动力由中心轴传递至边缘齿轮上
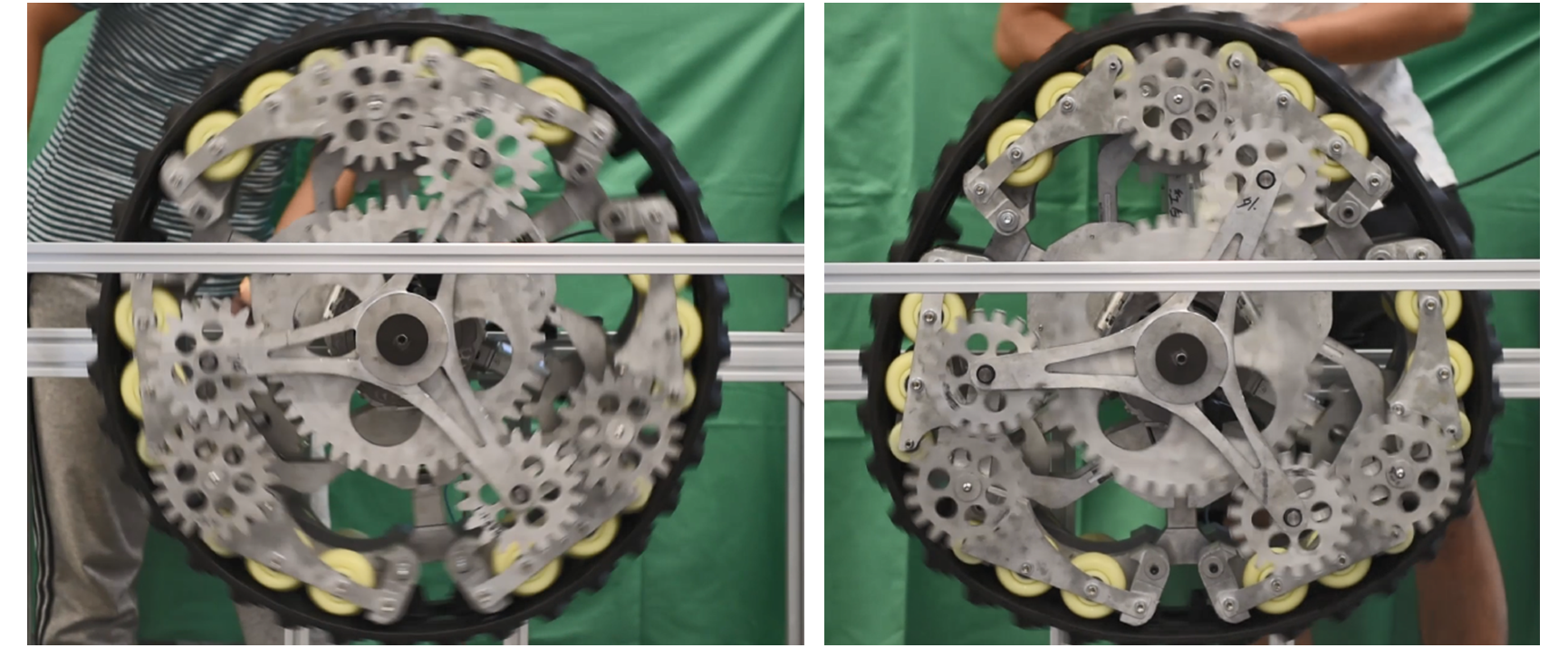
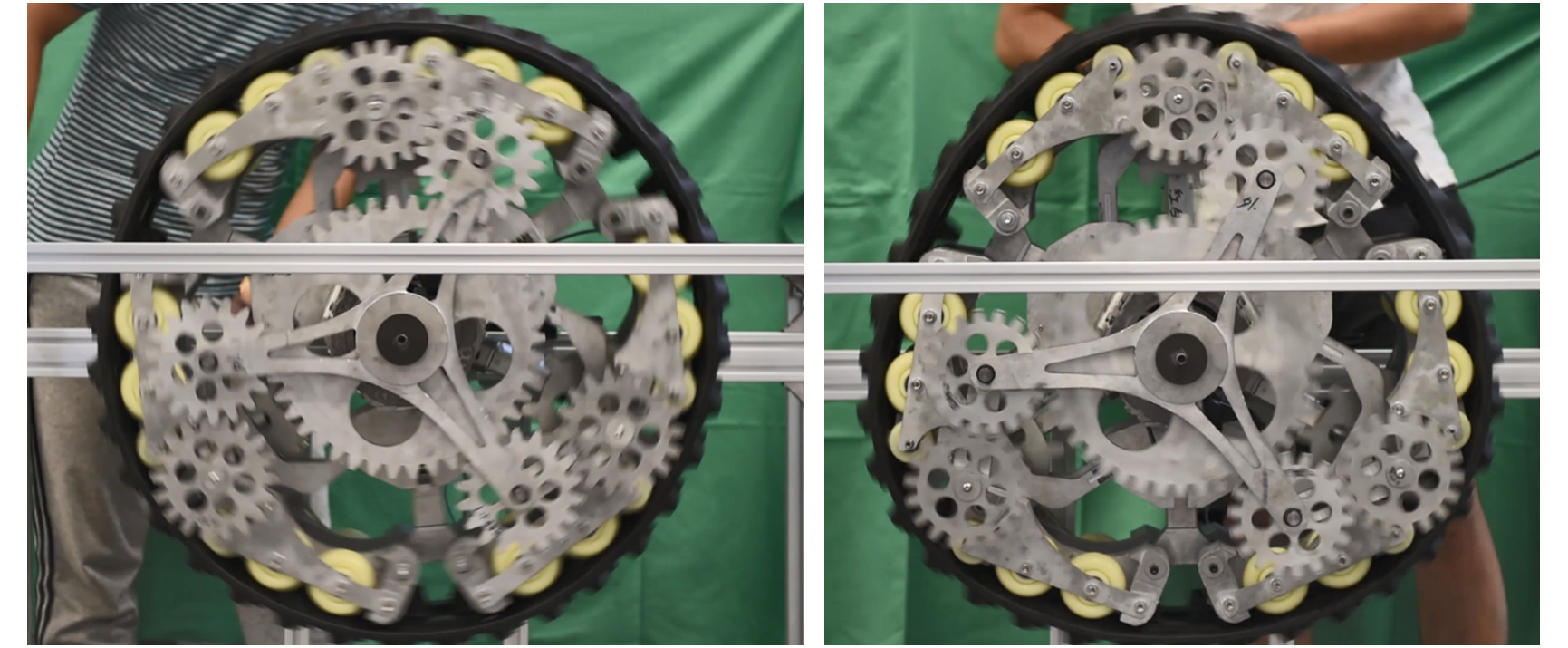
图5 行走装置实物
(a)圆形车轮模式转动(b)三角形履带模式传动
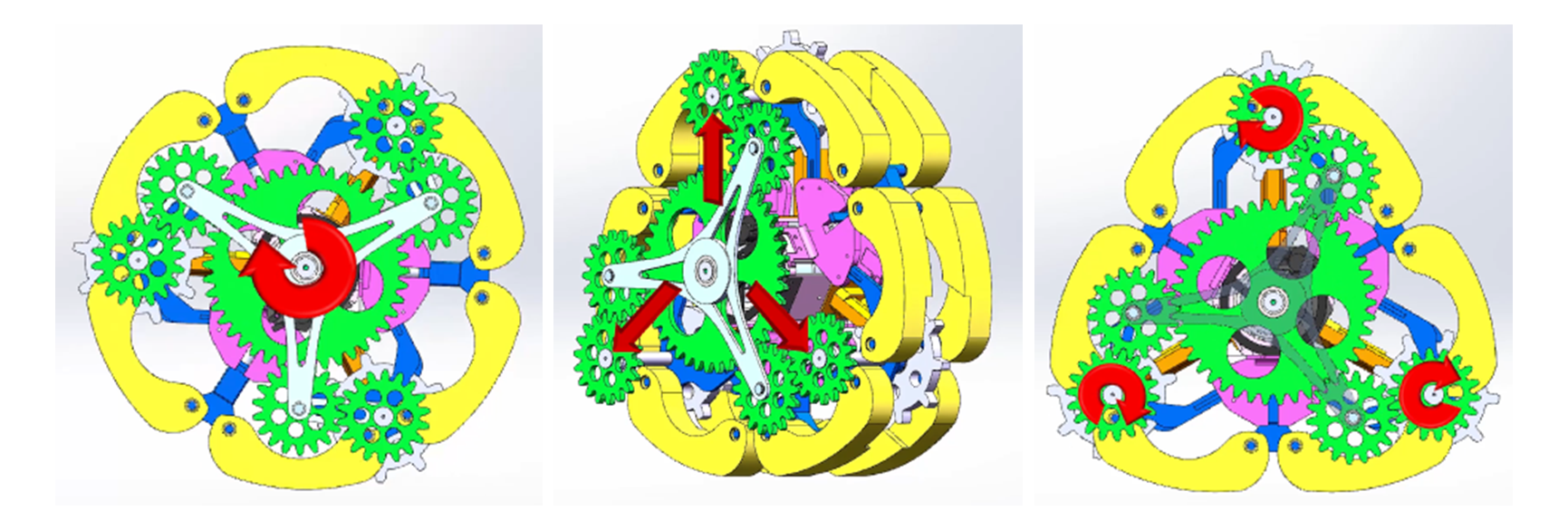
图6 新型可变形履带-车轮混合行走装置功能实现
(a)圆形车轮模式转动(b)变形过程(c)三角形履带模式传动
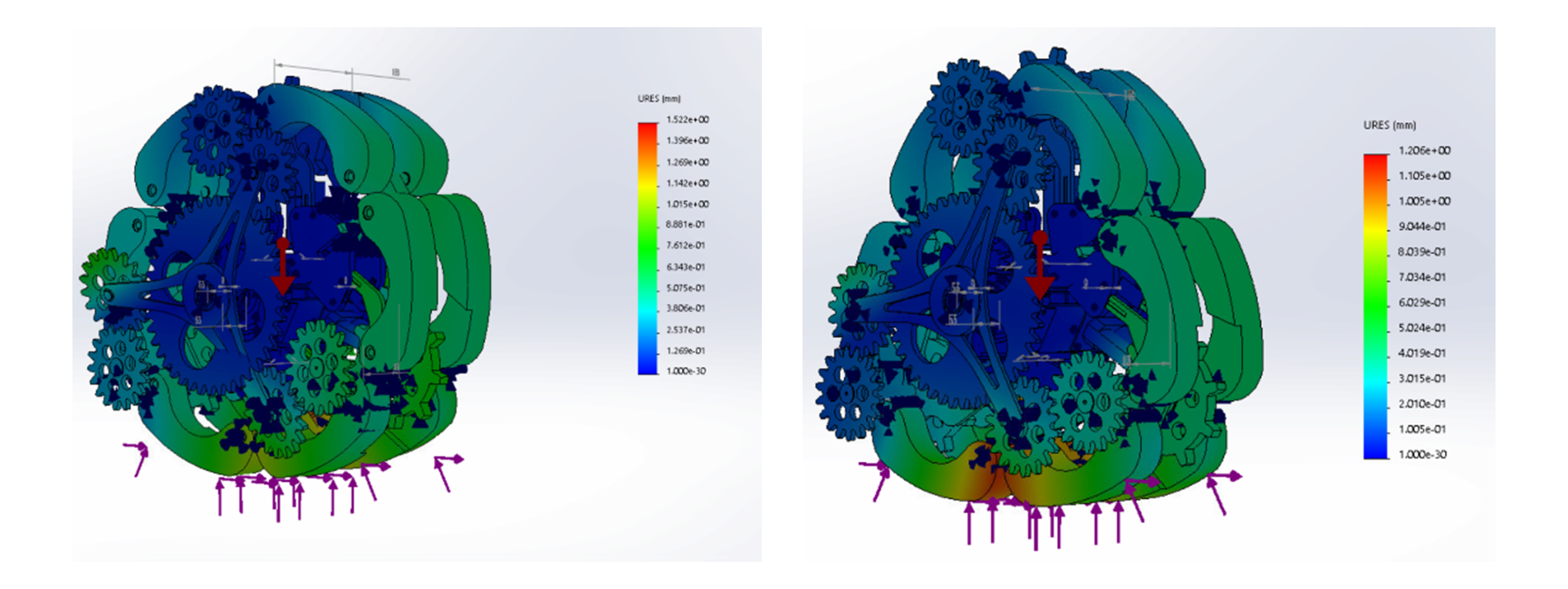
图7 强度校核实例
(a)圆形车轮转弯情况(b)三角形履带转弯情况
表1 新型可变形履带-车轮混合行走装置机构理论性能的校核与对比
|
性能参数 (按相同马力装甲车估算) |
轮式 行走装置 |
履带式 行走装置 |
新型可变形履带-车轮混合行走装置 (对当前结构) |
|
质量/(kg) |
共计约200 |
共计约600 |
单个约70 |
|
最高速度(公路)/(km/h) |
120 |
约60~75 |
≤100 |
|
最高速度(泥沼)/(km/h) |
≤30(陷车风险大) |
≤40(陷车风险小) |
≤40(陷车风险小) |
|
载重能力/(t) |
单胎载重约0.9-1.7 |
全车载重 >150 |
单胎载重 使用定制推杆可达2 |
|
寿命/(km) |
60k-80k |
>3k |
>3k |
外部链接:
联系方式:
手机号:17610029162
邮箱:zhiyf17@mails.tsinghua.edu.cn




